We present a self-supervised approach for learning
to predict traversable paths for wheeled mobile robots that
require good traction to navigate. Our algorithm, termed
WayFAST (Waypoint Free Autonomous Systems for Traversability),
uses RGB and depth data, along with navigation experience,
to autonomously generate traversable paths in outdoor
unstructured environments. Our key inspiration is that traction
can be estimated for rolling robots using kinodynamic models.
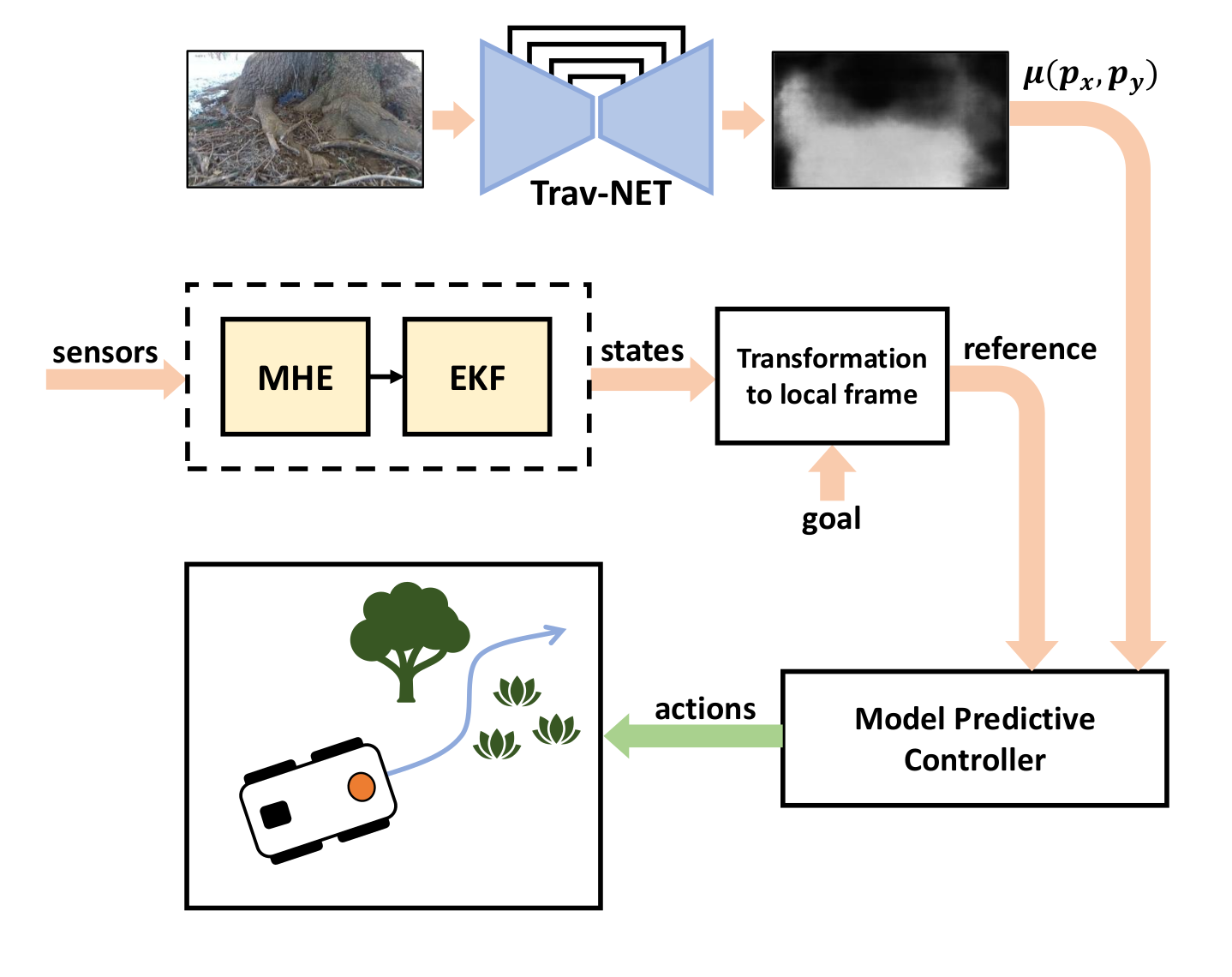
Using traction estimates provided by an online receding horizon
estimator, we are able to train a traversability prediction
neural network in a self-supervised manner, without requiring
heuristics utilized by previous methods. We demonstrate the
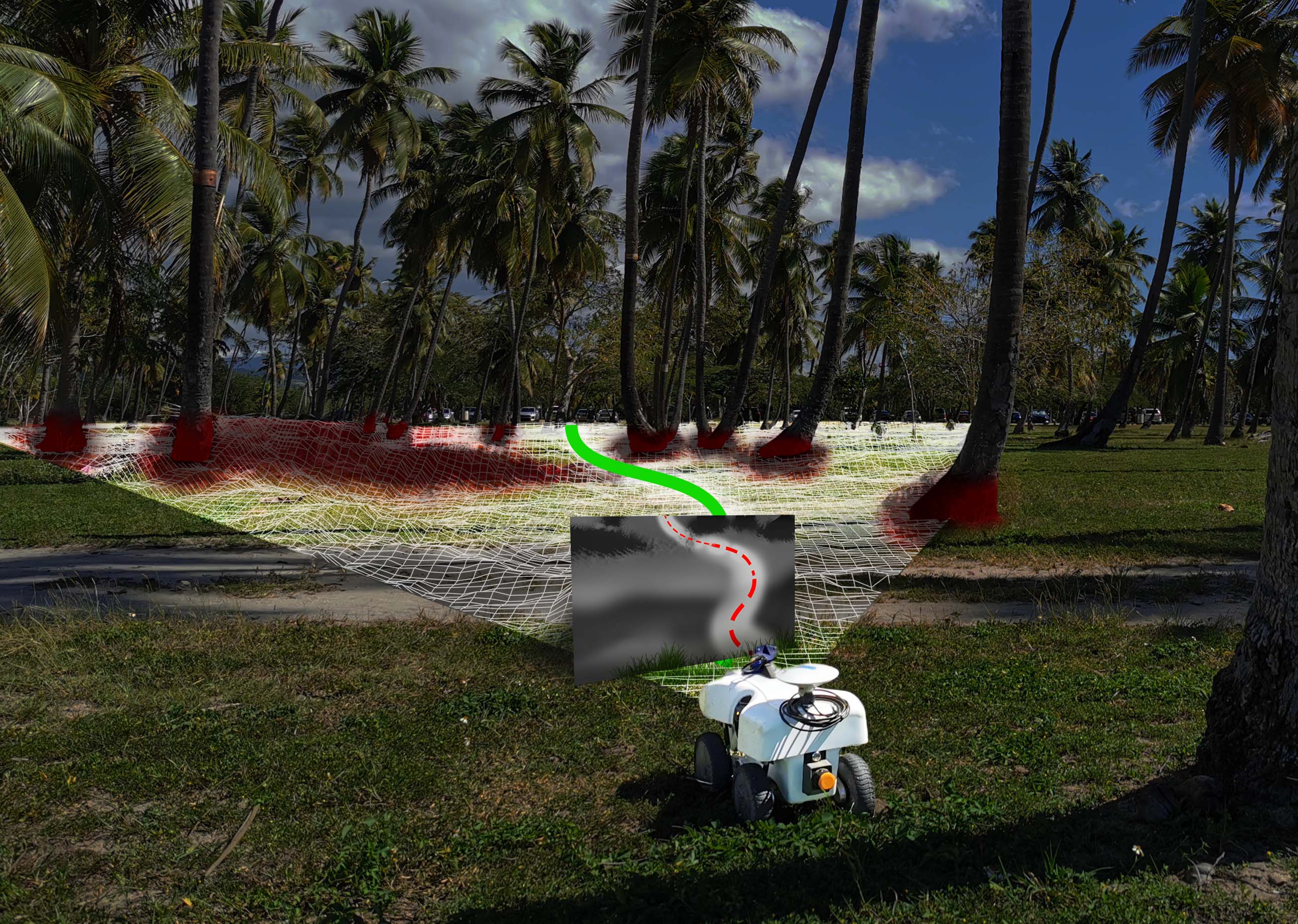
effectiveness of WayFAST through extensive field testing in
varying environments, ranging from sandy dry beaches to
forest canopies and snow covered grass fields. Our results
clearly demonstrate that WayFAST can learn to avoid geometric
obstacles as well as untraversable terrain, such as snow, which
would be difficult to avoid with sensors that provide only
geometric data, such as LiDAR. Furthermore, we show that
our training pipeline based on online traction estimates is more
data efficient than other heuristic-based methods.